Устройство и принцип работы
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Чип управления шаговым двигателем SAA1027
В этом уроке о вращательных приводах, мы рассмотрели шаговый двигатель в качестве электромеханического привода, который может быть использован в качестве устройства вывода для позиционной или скорости управления.
В следующем уроке об устройствах ввода / вывода мы продолжим наш взгляд на устройства вывода, называемые исполнительными механизмами, и в частности те, которые снова преобразуют электрический сигнал в звуковые волны с помощью электромагнетизма.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Это интересно: АСКУЭ — устройство, принцип работы, порядок монтажа
Принцип действия шаговых двигателей, разновидности
Шаговый двигатель в комплекте с драйвером выполняет преобразование числа входящих импульсов в заданное угловое перемещение вала. Устройство сопрягается с цифровой техникой, управляющий сигнал часто аналоговый. Входы обмоток посещает синусоида нужной фазы. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники.
Конструкция шагового двигателя
Особенностью шагового двигателя назовем форму стального ротора. Снабжен полюсами, подчеркнутыми путем вынесения на кончик острого либо тупого зубца. Мертвый металл, притягиваемый катушками статора. Характеризуется некоторой намагниченностью остаточного рода, вызванной действием поля. Точное позиционирование полюсов статора обеспечивает шаговому двигателю уникальное свойство: точное позиционирование по углу поворота вала. Из правила встречаются исключения, рассмотренные ниже по тексту.
Шаговые двигатели используются промышленностью, цифровой техникой – где требуется обеспечить точное позиционирование вала. Некоторые источники датируют изобретение серединой XIX века, первые сведения просочились в специализированные журналы в 20-х годах XX века. Речь о трехфазном реактивном шаговом двигателе. Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США.
Первый открытый патент получен на прибор с ротором, статором на 32 зуба шотландским инженером Уолкером в 1919 году. Прибор рассчитан работать с трехфазным напряжением. Сегодня шаговые двигатели встречаются в жестких дисках персональных компьютеров, автоматизированных линиях сборки. Ключевыми достоинствами считают низкую стоимость, простоту позиционирования. Альтернатив не придумано. Устройства применяются приблизительно с 70-х годов XX века, формируют четыре основные группы:
- Шаговые двигатели на постоянных магнитах.
- Гибридные синхронные двигатели.
- Вентильные реактивные двигатели.
- Шаговые двигатели Лавета.
Мировой практикой принята стандартизированная маркировка указанных разновидностей устройств:
Унифилярные:
- Красный, желтый – первая обмотка.
- Черный, оранжевый – вторая обмотка.
Бифилярные:
- Обмотка с центральным общим выводом. Красный, черный, красный с белым – первая обмотка. Зеленый, белый, зеленый с белым – вторая обмотка.
- Двойная обмотка полюса. Красный, красный с белым – первая пара первой обмотки. Желтый, желтый с белым – вторая пара первой обмотки. Черный, черный с белым —первая пара второй обмотки. Оранжевый, оранжевый с белым – вторая пара второй обмотки.
Каждая обмотка способна образовывать несколько полюсов. Для включения реверса бифилярных шаговых двигателей коммутируется другая пара контактов. И если для формирования обратного вращения унифилярных разновидностей нужен формирующий контроллер, здесь допустимо использовать рядовой контактор.
Критерии выбора трехфазного шагового электромотора
Чтобы правильно выбрать модель ШД, нужно учитывать ряд важных его параметров:
Мощность (кВт). Она постоянная и вычисляется путем умножения момента на скорость. Таким образом наблюдается обратно пропорциональная зависимость этих величин. На современном электротехническом рынке предлагается множество моделей с разными характеристиками, поэтому можно легко ошибиться;
Тип электромотора. Помимо рассматриваемых трехфазных моделей существуют также шаговые электромоторы биполярного, униполярного типа и прочие разновидности. 3-х фазные ШД характеризуются большими скоростными возможностями и меньшим крутящим моментом, чем аналогичные по размеру биполярные агрегаты. Благодаря лучшему сохранению момента их рекомендуется применять в скоростных передачах и приводах с редукторами. Биполярные моторы отличаются повышенным удельным моментом на низких скоростях и под них легче найти драйвер. Униполярные модели, по сути, состоят из нескольких биполярных ШД разного вида, гибко подключенных между собой с помощью обмоток;
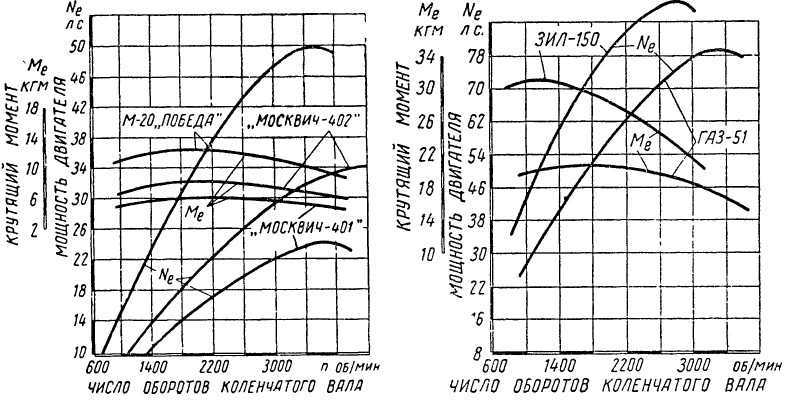
Зависимость скорости от вращающегося момента
На этот параметр при выборе шагового электромотора нужно обращать внимание в первую очередь. Существуют специальные графики, сверившись с которыми можно точно определить, подходит тот или иной конкретно взятый силовой агрегат под условия вашего технического задания;
![]()
Показатель индуктивности. Для его вычисления необходимо квадратный корень обмоточной индуктивности электромотора умножить на 32. Полученное значение должно быть максимально приближено к величине питающего напряжения вашего драйвера. При отклонении более тридцати процентов в большую сторону велика вероятность перегрева и появления шумов, а при недостаточной индуктивности будет наблюдаться стремительное снижение крутящего момента.
Также важно правильно подобрать габариты электромотора и диаметр его вала. Зачастую предлагаемые на рынке аналогичные по размеру шаговые двигатели от разных производителей обладают похожими параметрами
Как правило, именно габаритами агрегата определяется диапазон изменения его основной характеристики – графика зависимости скорости от момента. Величина тока на обмотках ШД косвенно связана с моментом вращения и определяет тип необходимого для его запуска драйвера, чтобы он мог генерировать именно такой уровень тока. От напряжения питания обмотки зависит допустимая величина подаваемого на мотор постоянного напряжения, а не показателя с применением широтно-импульсной модуляции. Также от этого косвенно зависит максимально возможный крутящий момент конкретно взятого шагового двигателя.
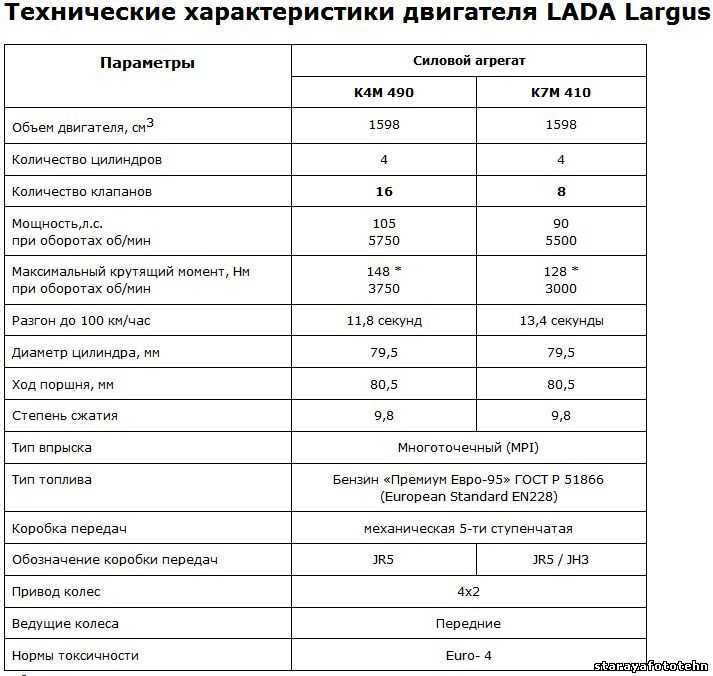
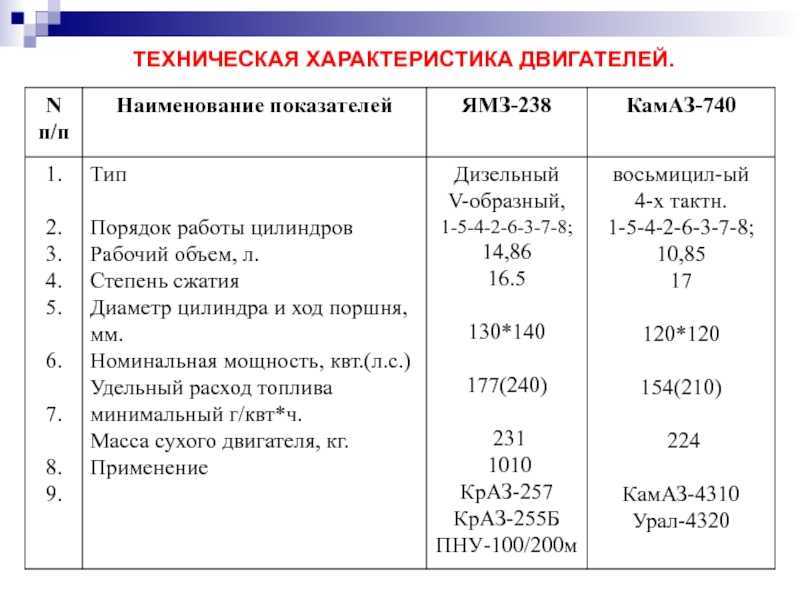
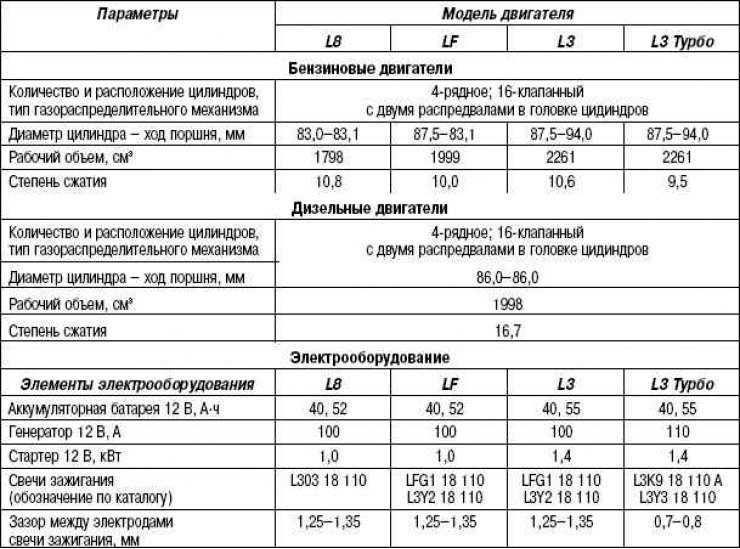
Двигатель СМД 14
Четырехцилиндровый дизельный мотор СМД 14А входит в комплектацию Харьковского трактора Т-74, а СМД-14Б предназначен для серийного трактора – ДТ-54В, выпускаемого на Волгоградском тракторном заводе.
Технические характеристики двигателя СМД 14
- Номинальная мощность мотора – 75 лошадиных сил.
- Количество цилиндров – 6 штук, диаметр – 130 мм.
- Характер расположения цилиндров – У-образное, с углом развала в 90°.
- Число оборотов коленвала 800 – 2180 об/мин.
- Длина хода поршня – 115 мм.
- Тип системы охлаждения – водяной.
- Вентиляция системы охлаждения – принудительного типа.
- В состав СМД-14 входит система пуска с мотором П-350.
Шаговые синхронные двигатели активного типа
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
![]()
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
![]()
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
![]()
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.


В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.
![]()
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
-
С переменным магнитным сопротивлением. Устройство таких моторов предполагает наличие нескольких полюсов на статичном элементе. Ротор в данном виде ШД обладает зубчатой формой и создается он из не жесткого материала, к тому же при этом сам не является намагниченным. Если мы в качестве примера рассмотрим мотор с переме
нным сопротивлением, в котором статор будет шести-полюсным, а конструкция ротора состоит из четырех зубцов, то количество независимых обмоток в таком двигателе составит 3 штуки. Каждая из них наматывается на два противоположных статорных полюса. Размер одного шага такого мотора составит 30 градусов. - ШД с постоянными магнитами. Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
- Шаговые двигатели гибридного типа. При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.
Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
![]() Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные. Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные. Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
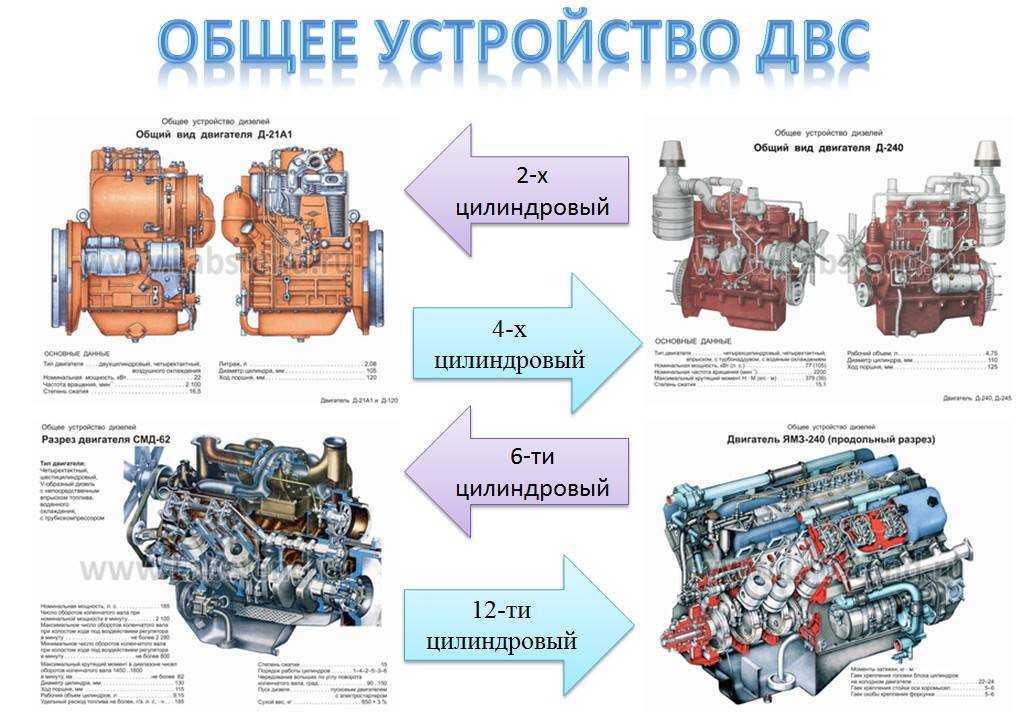
Устройство двигателей внутреннего сгорания: какие бывают разновидности и конфигурации
В конструкции современных автомобилей обычно применяются силовые установки с числом цилиндров от двух и больше. При том же объеме, двухцилиндровый мотор выдаст больший крутящий момент, чем одноцилиндровый, а четырехцилиндровый – соответственно, больше, чем двух. Однако «умножать» их количество можно только до какого‐то разумного предела: при всей эффективности, нужно соблюсти компактность, обеспечить цилиндрам равно хорошую смазку, подачу горючего и охлаждение.
В погоне за идеалом, конструкторы «разродились» несколькими схемами взаимной компоновки цилиндропоршневой группы и кривошипно‐шатунного механизма. Самые распространенные виды — рядная и V‐образная схема.
Рядный тип – это когда шатуны нескольких цилиндров (2-3-4-5-6 шт.) смонтированы на одном продольном коленчатом валу, каждый на отдельной «шейке», цилиндры идут в едином блоке, параллельно друг другу. Наиболее популярны 4 и 6‐цилиндровые версии.
![]() Рядный 4‐х цилиндровый двигатель в разрезе
Рядный 4‐х цилиндровый двигатель в разрезе
У V-образных движков, цилиндры которых расположены в два ряда, под взаимным углом 60, 90, либо 45 (мотоциклетные) градусов — на одной коренной шейке могут монтироваться по два шатуна одновременно. Самые надежные и сбалансированные — версии V6 и V8.
![]() V‐образный двигатель в разрезе
V‐образный двигатель в разрезе
Оппозитный вариант компоновки бывает двух видов: сходный с V-образным, но с развалом цилиндров 180 градусов и стыковкой шатунов на единой шейке, с последовательным поочередным выходом в ВМТ. Либо – с индивидуальными «коленами» для каждого из них, находящихся в противофазе: одновременно выходящих на ВМТ.
![]() Оппозитный двигатель в разрезе
Оппозитный двигатель в разрезе
U-образный тип компоновки подразумевает параллельное «сращивание» двух рядных моторов со взаимно независимыми кривошипными механизмами, вращающимися в противоположном направлении и рядами блоков. Преимущества – те же, что у «рядников», плюс компенсация инерционных вибраций.
![]() U‐образный двигатель Бугатти
U‐образный двигатель Бугатти
VR двигатель – очень старый (20 годов ХХ века) вариант V-образной компоновки с единым «коленом» и развалом цилиндров менее 20 градусов. Рядно‐смещенная схема позволяет сделать ДВС очень компактным при большой кубатуре.
![]() VR двигатель в разрезе
VR двигатель в разрезе
W-двигатель – наиболее монструозный вариант с тремя, или четырьмя рядами цилиндров, взаимно «разваленных» под углом от 50 до 30 градусов, шатуны которых посажены на единый коленвал. Преимущественно 12‐цилиндровый, формой напоминающий одноименную букву, движок выдавал бешеный крутящий момент. Применялся в основном на спорткарах.
![]() W‐образный двигатель в разрезе
W‐образный двигатель в разрезе
Лучшие шаговые двигатели NEMA 34
1. Hobby-Unlimited Шаговый двигатель NEMA 34 — Лучший шаговый двигатель NEMA 34
Шаговый двигатель NEMA 34
| Номинальный ток | 6А |
| Удерживающий крутящий момент | 1200 унций в |
| Совместимый драйвер | DM860T (и выше) |
Краткие технические характеристики
Это шаговый двигатель NEMA 34 с удерживающим моментом 1200 унций и номинальным максимальным током 6 А на фазу. Удерживающий момент на нем в три раза больше, чем у предыдущего двигателя NEMA 23 с номиналом 4,2 А. Этот двигатель подходит для оси Z тяжелых настольных фрезерных станков. Один двигатель такого размера теоретически может поднять вес 75 фунтов, и этот шаговый двигатель является определением сверхмощного шагового двигателя.
Единственная причина, по которой вам понадобится этот двигатель для DIY-фрезерного станка с ЧПУ, — это если вы хотите вести постоянную производственную работу и вам нужно немного дополнительных преимуществ, которые вы получаете от более высокой мощности. Однако за дополнительную мощность приходится платить. Для этого двигателя вам потребуются монтажные кронштейны большего размера.
Кроме того, проверьте, в каком приложении, в котором вы используете двигатель, есть место для двигателя размером 86 x 86 мм и длиной 114 мм. Если вам нужно использовать такой мощный двигатель, убедитесь, что остальная часть вашей механической системы выдержит его. Вам нужно очень жесткое и прочное шасси, способное выдержать высокий крутящий момент, создаваемый этим двигателем. Если вы запустите это на слабой механической системе, которая не может выдержать нагрузку, вся установка может рухнуть и вызвать повреждение. Чтобы запустить этот двигатель, вам понадобится драйвер, способный выдавать больше, чем 6А.


Driver DM860T шагового является хорошим выбором для этого мотора. Он предназначен для работы двигателей NEMA 34 и NEMA 42 с диапазоном тока 2,4–7,2 А и источником питания 18–80 В переменного тока или 36–110 В постоянного тока. Этот двигатель NEMA 34 имеет четыре подводящих провода. Также он весит 7,5 фунтов (3,4 кг). Сверхмощный шаговый двигатель HobbyUnlimited со стальным корпусом рассчитан на длительный срок службы. Двигатель обеспечивает высокий удерживающий момент 1200 унций на дюйм за счет длинного 14-миллиметрового вала со шпоночной канавкой 5 мм. Двигатель имеет фиксированный угол шага 1,8 градуса и точность шага 5 процентов. Двигатель также работает при температуре окружающей среды от 20 ° C до 50 ° C (приблизительно).
ЗА:
- Высокий крутящий момент
- Прочный корпус, рассчитанный на длительный срок службы
МИНУСЫ:
Тяжелый — 3,6 кг
Шаговые синхронные двигатели активного типа
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Об энкодерах и драйверах, подключениях
Специальные драйверы нужны для того, чтобы управлять устройством. Они подключаются к LTP портам у персональных компьютеров. От программы идёт генерация сигналов, которые потом принимаются драйверами. После чего двигатель и получает определённые команды. Подача тока на обмотки позволяет организовать работу всего устройства. Программное обеспечение облегчает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем двигателем. Формирование управляющего сигнала происходит при участии специального контроллера. Что предполагает подключение к устройству сразу четырёх выводов шагового двигателя. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для дальнейшей работы.
С контроллера ПУ сигналы идут к драйверу. Далее организуется управление процессом, во время которого переключаются ключи, составляющие схему с питающим напряжением. Последнее идёт с блока питания, на двигатель, проходя по ключам.
![]()
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз. При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя
Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания
Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим. Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
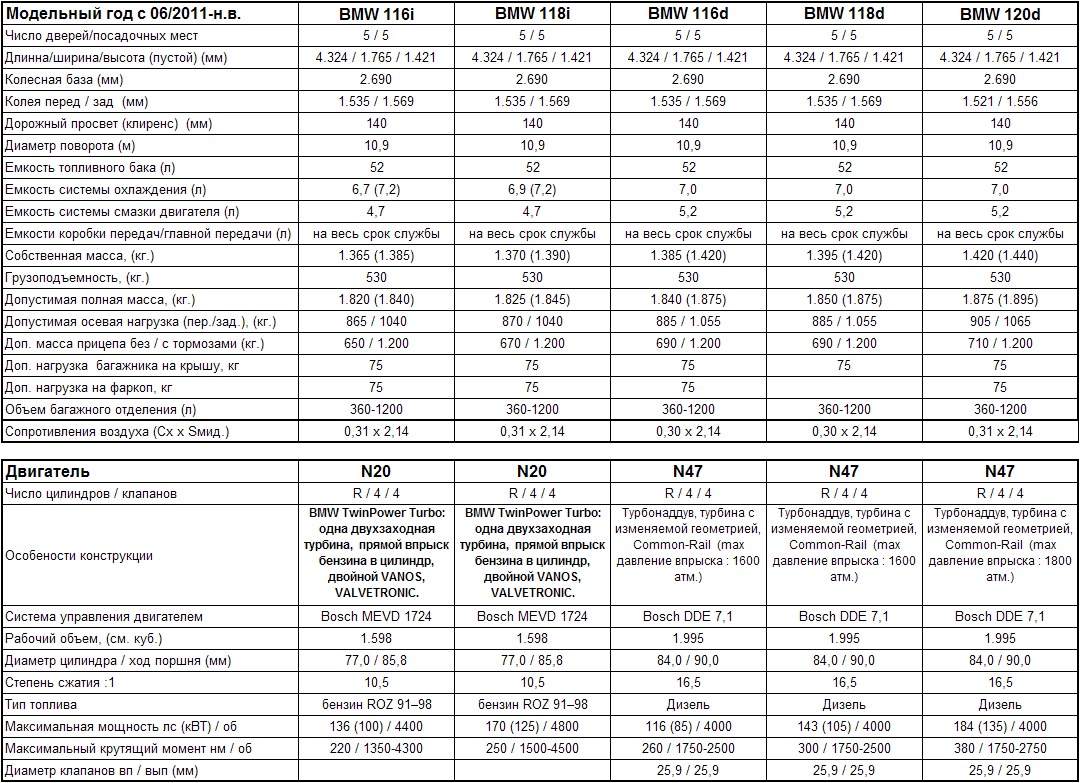
Характеристики двигателя ВАЗ 21116 1.6 8V Гранта, Калина 2
| Параметр | Значение |
|---|---|
| Конфигурация | L |
| Число цилиндров | 4 |
| Объем, л | 1,597 |
| Диаметр цилиндра, мм | 82 |
| Ход поршня, мм | 75,6 |
| Степень сжатия | 10,5 |
| Число клапанов на цилиндр | 2 (1-впуск; 1-выпуск) |
| Газораспределительный механизм | SOHC |
| Порядок работы цилиндров | 1-3-4-2 |
| Номинальная мощность двигателя / при частоте вращения коленчатого вала | 66 кВт-(90,0 л.с.) / 5600 об/мин |
| Максимальный крутящий момент / при частоте вращения коленчатого вала | 143 Н·м / 3500 об/мин |
| Система питания | распределенный впрыск с электронным управлением |
| Рекомендованное минимальное октановое число бензина | 95 |
| Экологические нормы | Евро 4 |
| Вес, кг | 112 |
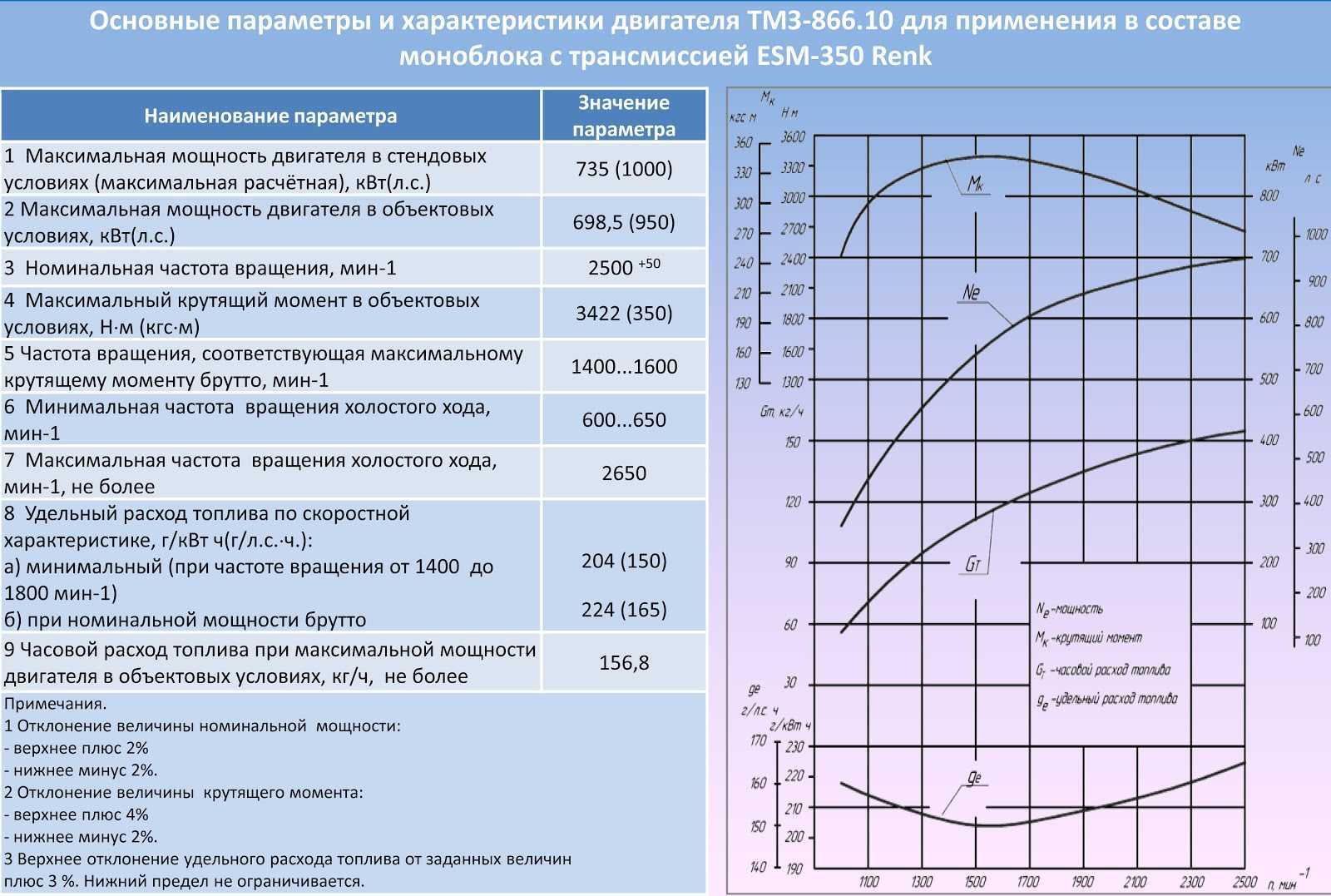
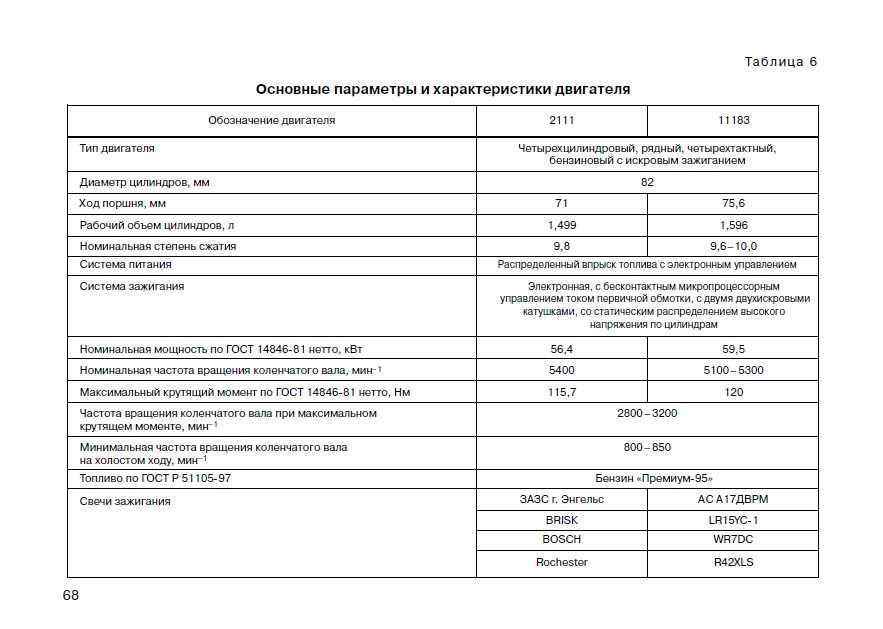
Показатели двигателей
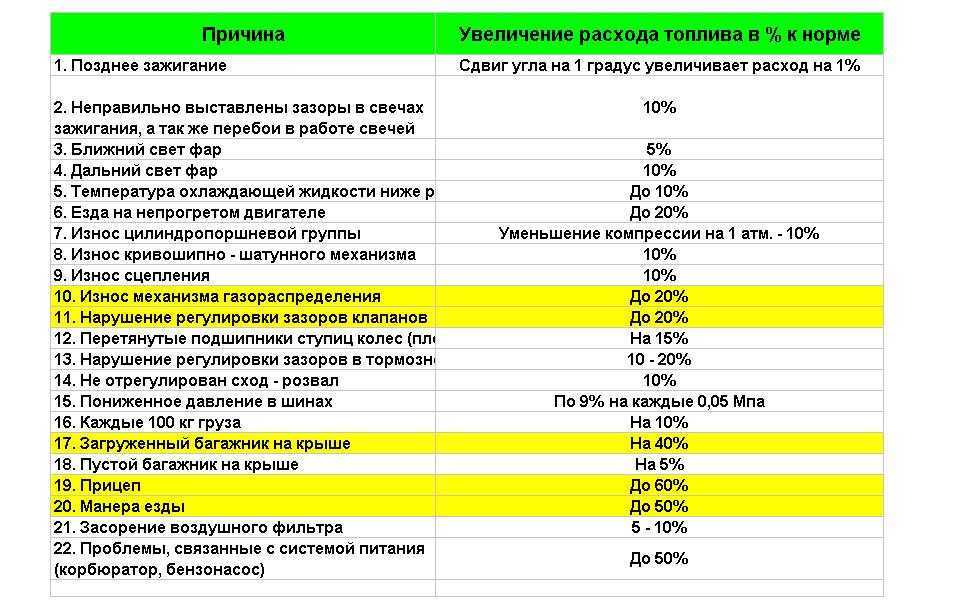
Показателями двигателя называют величины, характеризующие его работу. Помимо конструктивных параметров, они зависят от особенностей и настроек систем питания и зажигания, степени износа деталей и пр.
Давление в конце такта сжатия (компрессия) является показателем технического состояния (изношенности) цилиндро-поршневой группы и клапанов.
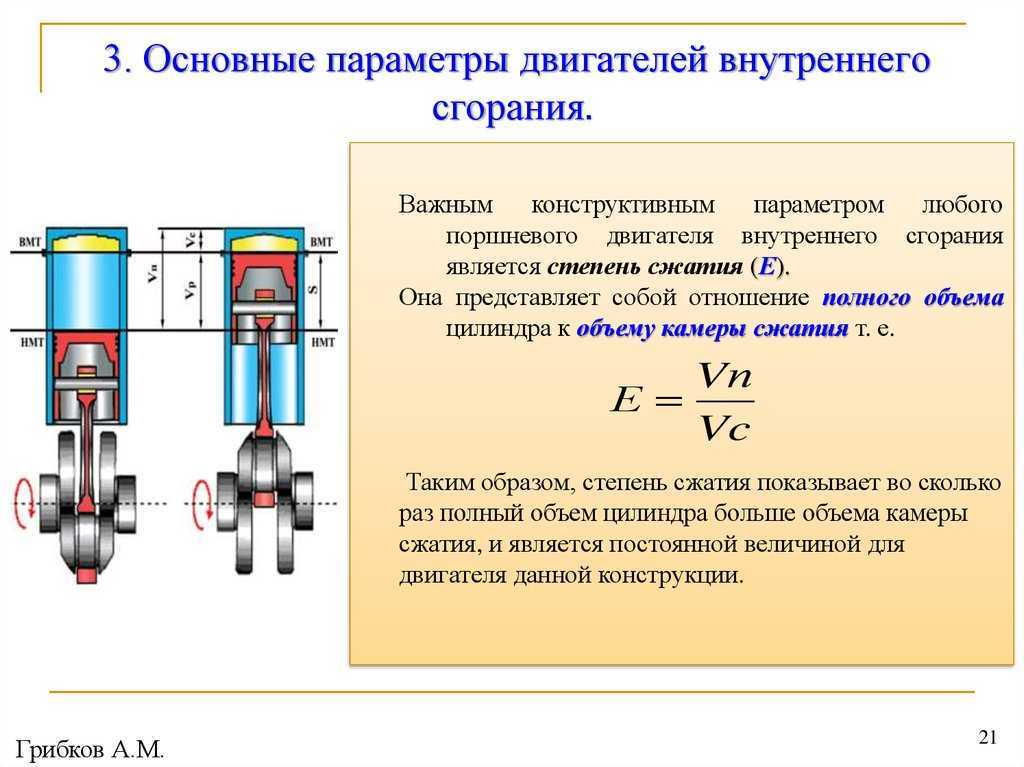
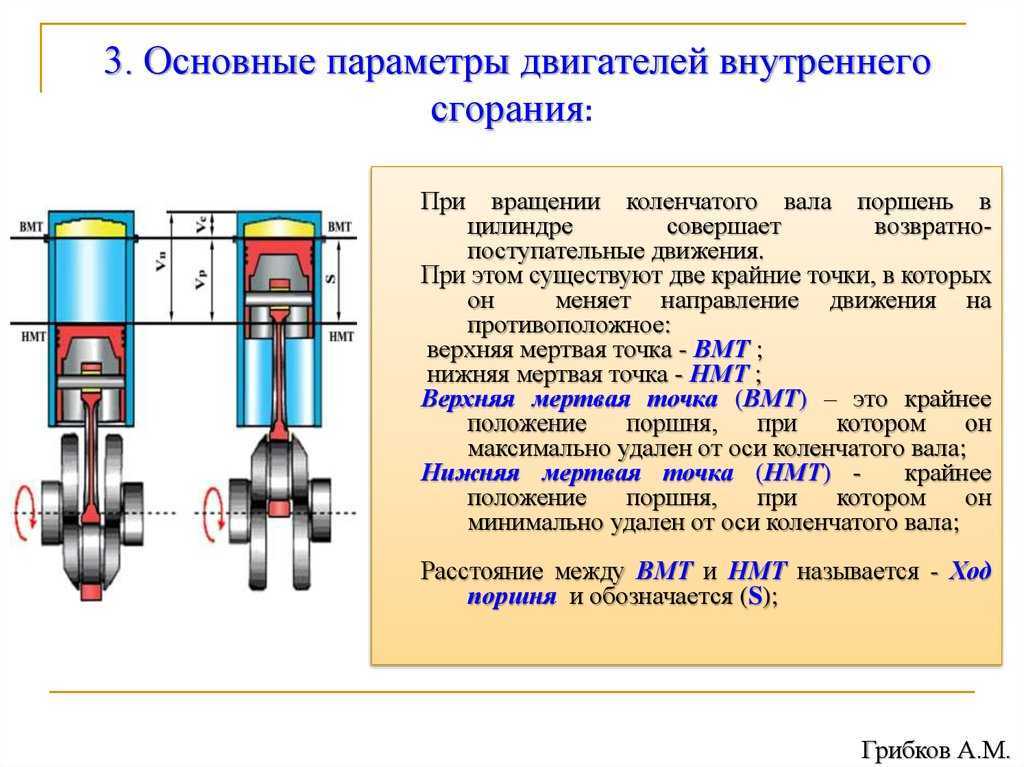
Крутящий момент на коленчатом валу двигателя определяет силу тяги на колесах: чем он больше, тем лучше динамика разгона автомобиля. Равен произведению силы на плечо (рис. 3) и измеряется в Н·м (Ньютон на метр), ранее в кгс.м (килограмм-сила на метр).
Крутящий момент увеличивается с ростом: рабочего объема . Поэтому двигатели, которым необходим значительный крутящий момент, обладают большим объемом; давления горящих газов в цилиндрах, которое ограничено детонацией (взрывное горение бензо-воздушной смеси, сопровождаемое характерным звонким звуком. Ошибочно называется «стуком поршневых пальцев») или ростом нагрузок в дизелях.
Максимальный крутящий момент двигатель развивает при определенных оборотах (см. ниже), они вместе с его величиной указываются в технической документации.
Мощность двигателя — величина, показывающая, какую работу он совершает в единицу времени, измеряется в кВт (ранее в лошадиных силах). Одна лошадиная сила (л.с.) приблизительно равняется 0,74 кВт. Мощность равна произведению крутящего момента на угловую скорость коленвала (число оборотов в минуту, умноженное на определенный коэффициент).
Двигатели большей мощности производители получают увеличением: рабочего объема, что, в свою очередь, приводит к росту габаритов двигателя и ограничению допустимых максимальных оборотов из-за значительных сил инерции увеличившихся деталей; оборотов коленчатого вала, число которых ограничено инерционными силами и увеличением износа деталей. Высокооборотный двигатель одинаковой мощности (при прочих равных условиях — конструкции двигателя, технологии изготовления, применяемых материалах и т.д.) с низкооборотным обладает меньшим сроком службы, так как в среднем для одного и того же пробега его коленчатый вал будет совершать больше оборотов; давления в цилиндре путем повышения степени сжатия либо наддувом воздуха посредством турбо- или механических нагнетателей. Для применения наддува степень сжатия вынужденно уменьшают для предотвращения детонации (у бензиновых двигателей) и снижения жесткости работы (повышенные нагрузки в цилиндро-поршневой группе дизеля, сопровождаемые чрезмерным шумом) (у дизелей). Наддув позволяет, например, сохранить мощность при меньшем рабочем объеме.
Номинальная мощность — гарантируемая производителем мощность при полной подаче топлива на определенных оборотах. Именно она, а не максимальная мощность, указывается в технической документации на двигатель.
Удельный расход топлива — это количество топлива, расходуемого двигателем на 1 кВт развиваемой мощности за один час. Является показателем совершенства конструкции двигателя: чем расход ниже, тем более эффективно используется энергия сгорающего в цилиндрах топлива.
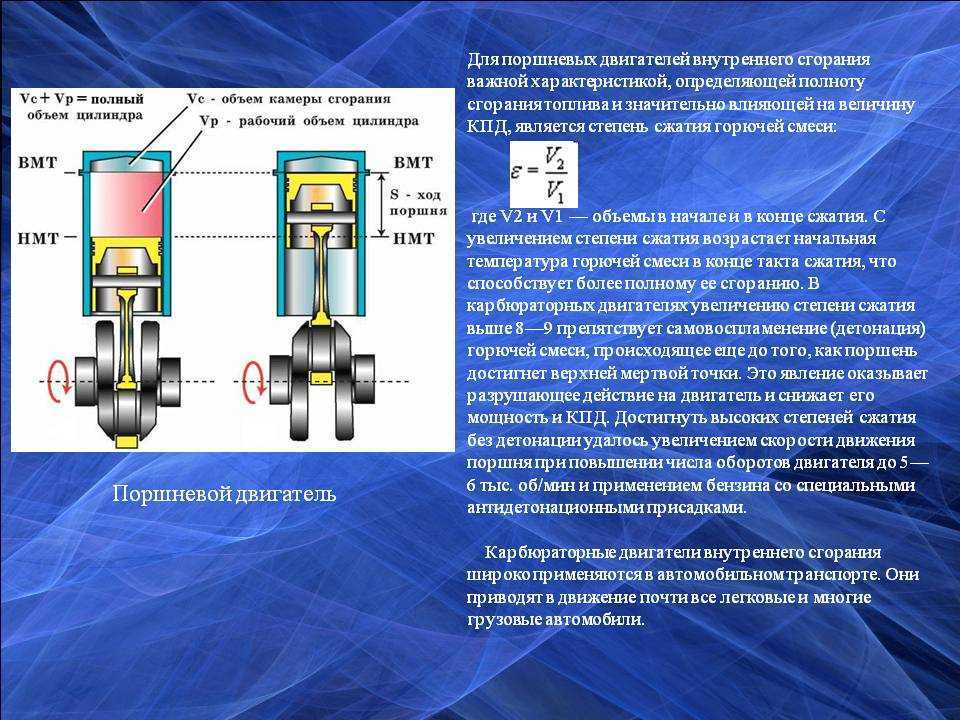
Конструкция шагового электродвигателя
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
![]()
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор
не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор
шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.